Laser-Actuated Micro-hand Achieves Dexterous Manipulation at Micron Scale
Robotic manipulation has come a long way in recent years, but until now, achieving the same level of finesse and control at the micro-level has been a significant challenge. Current micro-manipulation technologies, such as optical tweezers and magnetic tweezers, can only perform simple tasks like pushing and picking, and are constrained by the objects’ opacity or magnetic properties. Scientists at Tsinghua University in Beijing have recently made a breakthrough in the field by developing a laser-actuated multi-fingered hand for dexterous manipulation of micro-objects. This innovative approach is poised to revolutionize micro-manipulation tasks and push the boundaries of nano and micro-technologies.
Micromanipulation has applications in micro technologies, biological and pharmaceutical sciences, and clinical diagnosis. As a result, the need for a versatile and dexterous micro-manipulation system has never been greater.
A New Approach To Micro-Manipulation: The Laser-Actuated Multi-fingered Hand
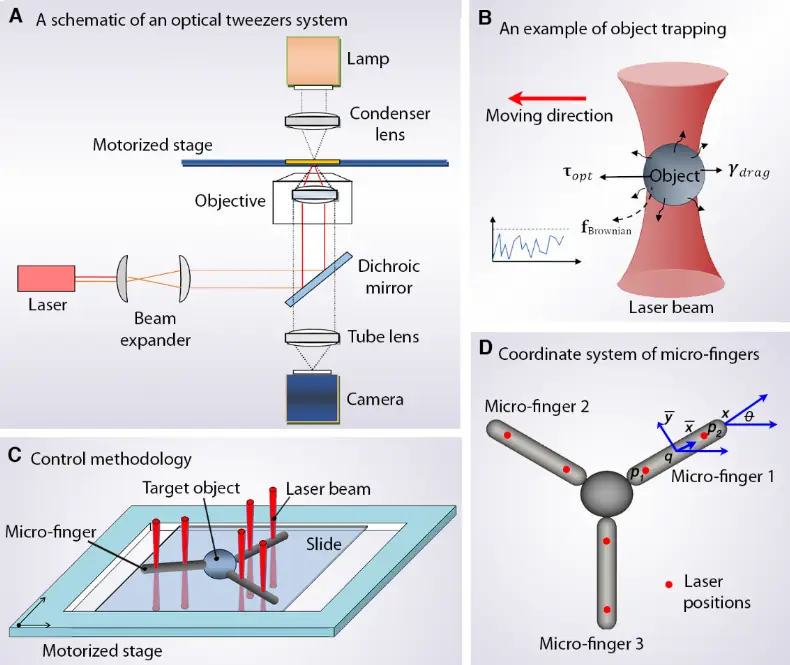
One of the main difficulties in achieving dexterous manipulation at the micro-level is the development of actuators and sensors that can function at such a small scale. To overcome these challenges, scientists have developed a micro multi-fingered hand that is actuated by optical traps. The laser-actuated system coordinates several micro-fingers to function as a robotic micro-hand, enabling complex manipulation tasks at the micron scale.
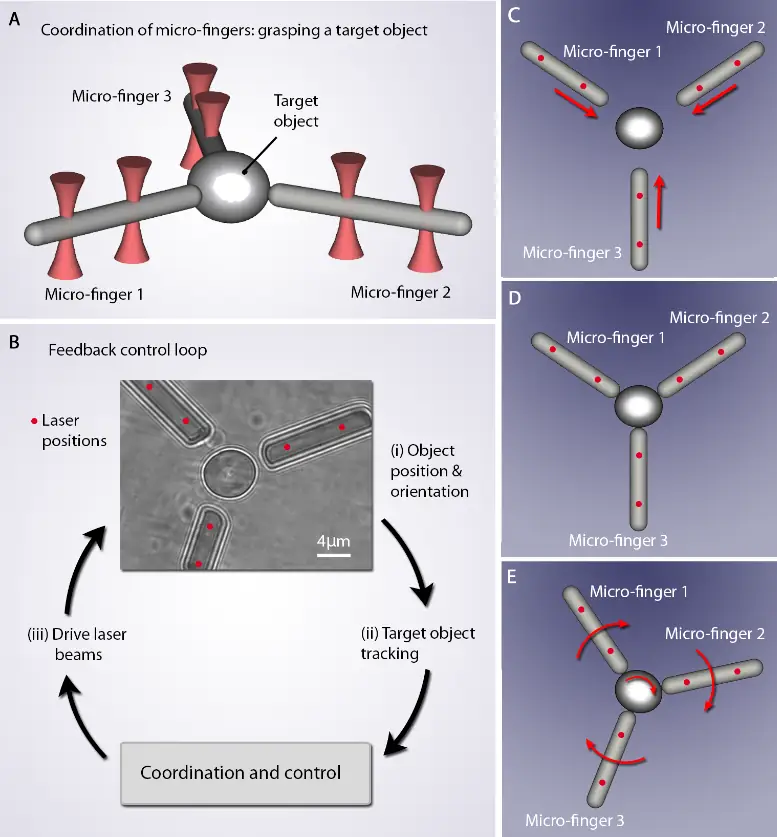
The micro-fingers are configured with three degrees of freedom in a 2-dimensional space, allowing the micro-hand to perform various tasks such as grasping, rotating, and moving objects. This groundbreaking approach establishes a foundation for achieving dexterous robotic manipulation of objects at the micron scale.
Experiments Showcase the Capabilities of the Laser-actuated Micro-hand
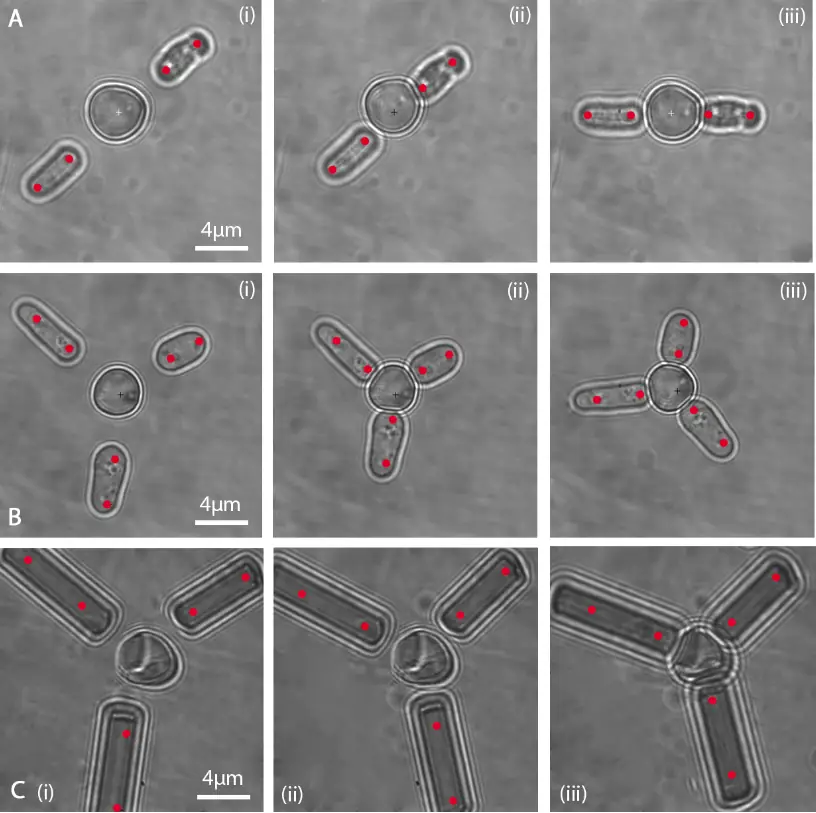
In a series of experiments, the research team demonstrated the dexterity and adaptability of the laser-actuated multi-fingered hand. Two types of micro-fingers, micro-rods, and S-pombe yeasts, were employed to manipulate target objects. Micro-rods were chosen due to their commercial availability in various diameters and lengths, while S-pombe yeasts offered a natural and easily cultured alternative. Corn-flour particles served as the target objects for the experiments.
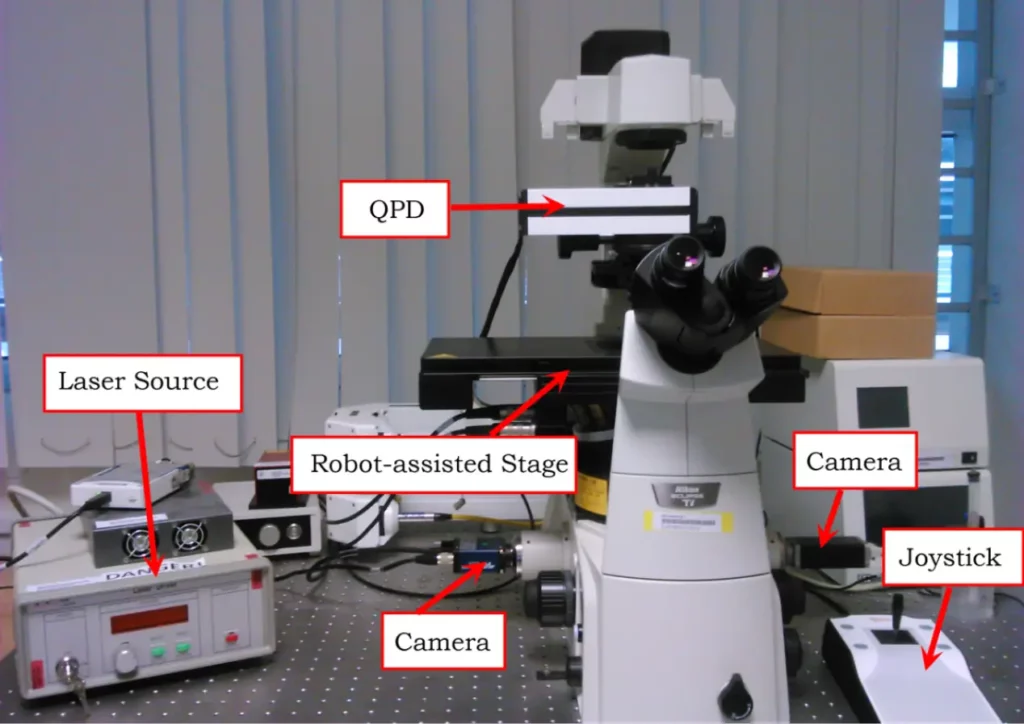
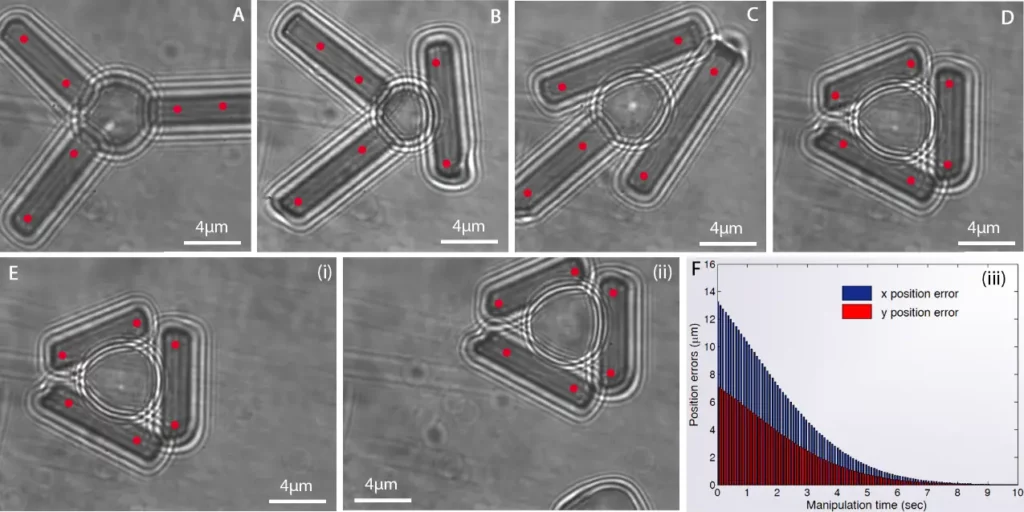
To create the ideal environment for the optical tweezers system, the micro-fingers and corn-flour particles were mixed with water and placed on a glass slide. The researchers successfully showcased the micro-hand’s ability to grasp, rotate, and move the target objects using the laser-actuated micro-fingers.
By using any number of rod-shaped micro-objects as fingers, the micro-hand can easily adapt to different tasks or requirements. Furthermore, its reconfigurable structure allows it to perform a wide range of manipulation tasks with ease.
The researchers also developed a feedback control algorithm that ensures high-accuracy positioning and rotation during manipulation. This level of precision is crucial for various applications in micro technologies, biological and pharmaceutical sciences, and clinical diagnosis, paving the way for more advanced micro-manipulation systems in the future.
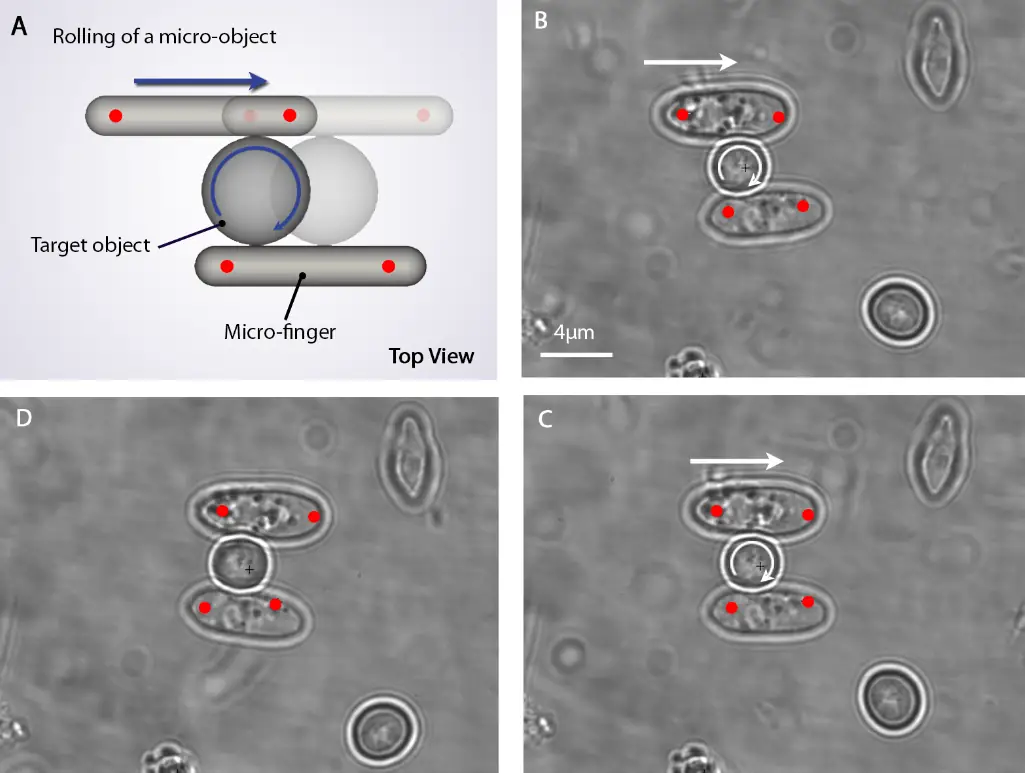
Rolling Micro-Objects: A Step Forward in Biological Cell Property Investigation
The optically actuated micro-hand has demonstrated the capability to roll micro-objects, a feat that holds significant potential for investigating biological cell properties. Rolling adhesion plays a critical role in various biological processes, such as inflammatory responses and cancer metastasis. By enabling dexterous micro-manipulation like rolling, the laser-actuated multi-fingered hand could significantly contribute to the research of these critical biological phenomena.
Moreover, the new micro-hand technology can also be applied in micro-scale mechanical systems like micro-electromechanical systems (MEMS). These tiny devices are utilized in various industries, such as automotive, aerospace, and medical equipment, where precise manipulation at the micro-scale is essential for optimal performance.
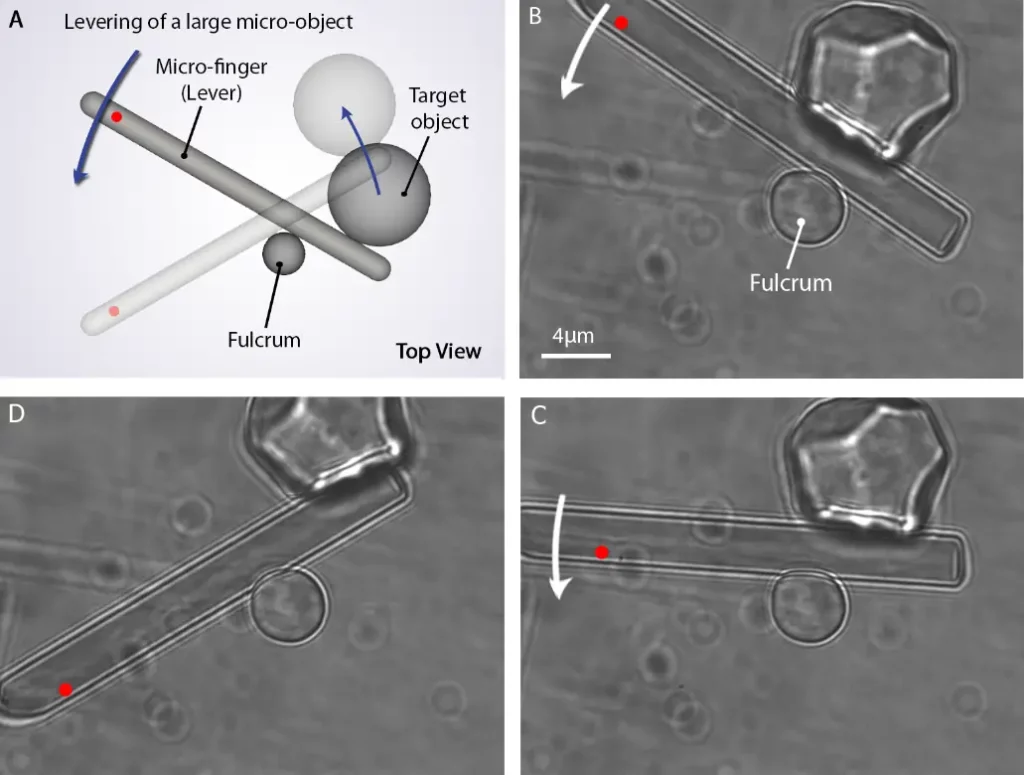
Levering Large Micro-Objects: Amplifying Fingertip Force with the Micro Robot Hand
One of the notable achievements of the laser-actuated multi-fingered hand is its ability to leverage large micro-objects by amplifying the fingertip force based on the lever principle. Researchers successfully demonstrated the manipulation of a larger target micro-object in a small distance by pivoting it around a central fulcrum, showcasing the versatility and capabilities of the micro-hand.
This approach allows for greater flexibility in manipulating objects at the micron scale, providing an essential tool for a wide range of applications, including micro-manufacturing, micro-assembly, and even micro-scale surgery.
Its ability to roll micro-objects and leverage large micro-objects offers numerous possibilities for both scientific research and practical applications. As researchers continue to develop and refine this technology, its capabilities will likely expand, leading to even more impressive feats of dexterity at the micron scale.
Potential Future Applications and Developments: Broadening the Horizons
As the laser-actuated micro-manipulation technology continues to evolve, there is great potential for its application in various fields. For instance, the production of microchips and other micro-sized devices, could greatly benefit from this advanced manipulation technique. In addition, the biological and pharmaceutical sciences may find valuable uses for the micro-hand, especially when it comes to handling delicate biological samples or conducting intricate experiments at the micro-scale.
Furthermore, clinical diagnosis and treatment could also see significant advancements with the help of this dexterous micro-manipulation technology. Imagine the possibilities for micro-scale surgery, targeted drug delivery, or even the manipulation of individual cells for gene editing purposes.
Researchers will need to continue developing enhanced actuation and sensing methods that further improve dexterity at the micron scale. As this field of study progresses, we can expect to see a wide range of innovative applications and breakthroughs that will undoubtedly reshape the way we interact with the micro-world.